Hm, verstehe. Das ist natürlich aus der Ferne schwer zu beurteilen und Rat zu geben. Am Loop liegt es dann aber eher nicht...
Beiträge von Go4IT
-
-
Nachdem ich nun auch einen Batteriesensor im Fahrzeug habe, gebe ich mich mal ans Decoding der Nachrichten die dieser mit dem BCM so austauscht. Mein erster Test war einfach mal ein Oszi dran hängen (kleiner Tipp: mit einem "Ossi" klappt es leider nicht!) und siehe da: nach dem einschalten der Zündung habe ich dort heftigen Grenzverkehr

Dann werde ich mir jetzt mal einen kleinen LIN-Bus Sniffer zusammenbauen und mal schauen was ich dort so finde. LIN ist ja im Grunde nichts anderes als ein Serieller-Port mit ein paar Spezialitäten (BREAK). Ich wollte mir immer mal einen LIN-Bus Adapter für PC kaufen, stattdessen habe ich mir immer was zusammengelötet... naja.
-
Hallo, aus eigenem Interesse habe ich mir dieses Thema mal vorgenommen...
Ziel
Es geht darum in einem MK4 einen Batteriesensor nachzurüsten um ggf. das Lademanagement zu verbessern. Ob das wirklich etwas bringt steht noch in den Sternen, es ist also vorerst mal ein ambitioniertes Projekt zum Erkenntnisgewinn.
Aus div. anderen Konversationen hier wurde klar das der Batteriesensor bereits im vFL eingeführt wurde, genauso wie das oft damit in Verbindung gebrachte Start/Stopp-System. Jedoch gibt es auch genügend Belege dafür das der Sensor auch in Fahrzeugen ohne Start/Stopp enthalten ist. Fakt ist wohl das wenn ein Fahrzeug Start/Stopp ab Werk hat, das dann auch neben einer EFB-Batterie ein Batteriesensor enthalten ist.
Hintergrundinformationen
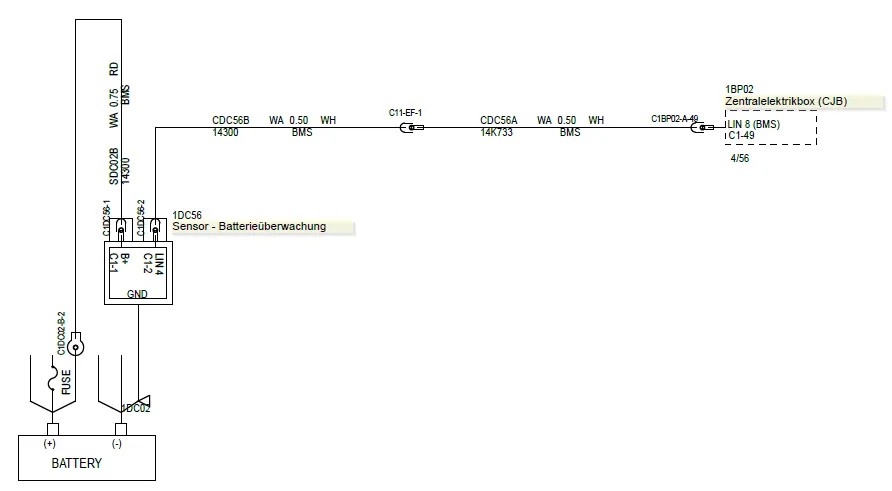
Das BMS (Batterie-Management-System) des Mondeo ist in Form einer Software im BCM enthalten. Das Vorhandensein eines Batteriesensors wird in der Fahrzeugkonfiguration (CCC) hinterlegt. Elektrisch ist das ganze so verschaltet:
Die Nachrüstung
Benötigte Teile
Ein Batterie-Massekabel mit Sensor (AG9N-10C679-DC):

Voraussetzungen
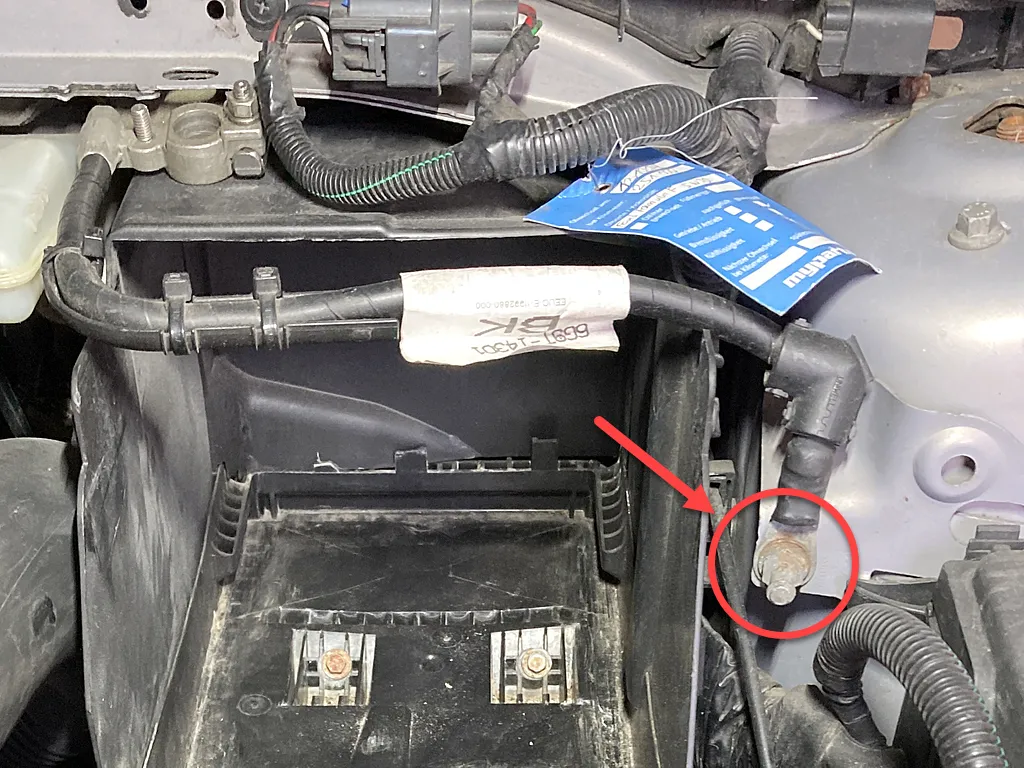
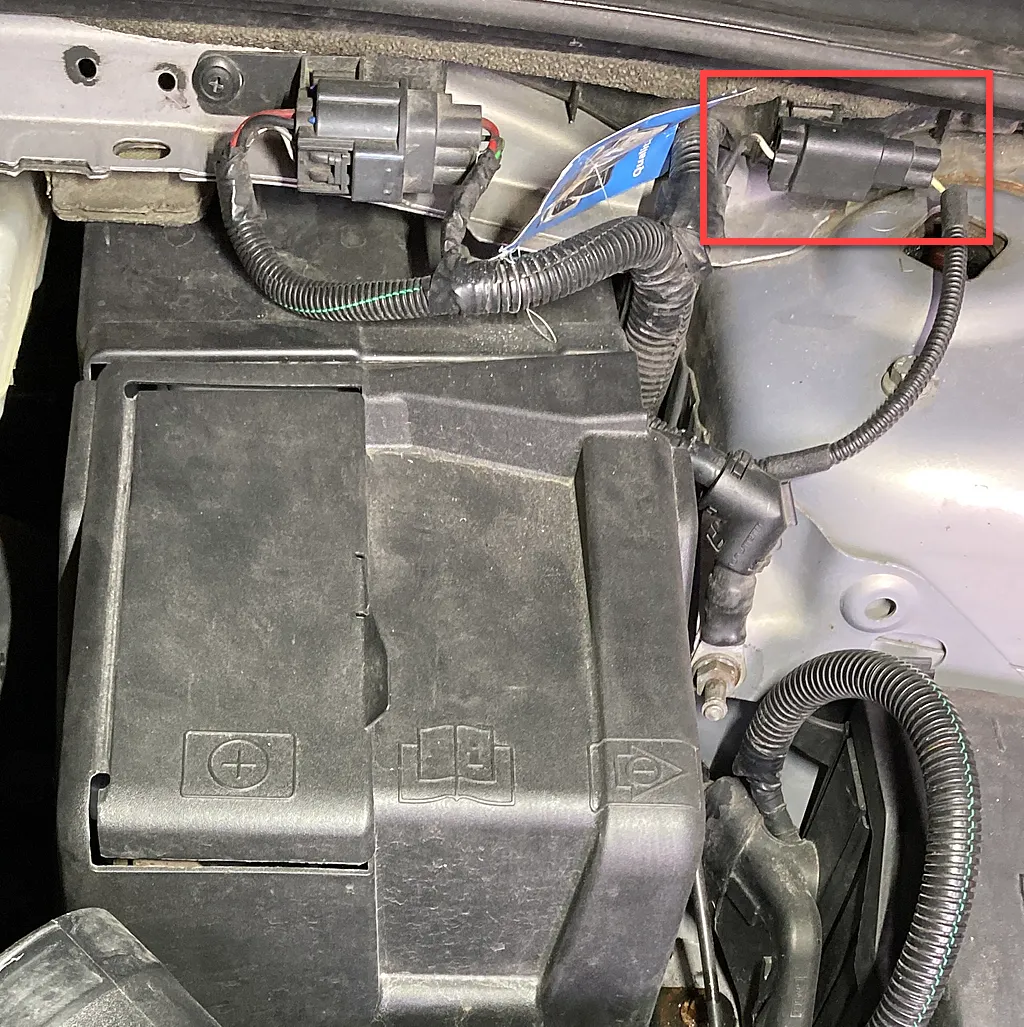
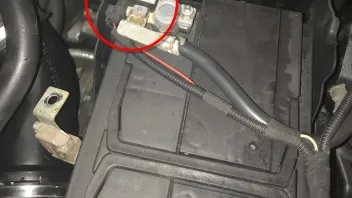
Wie immer gilt es die Voraussetzungen vorab zu prüfen um den Umfang des Retrofits festzulegen, in diesem Fall das Vorhandensein des Steckers für den Batteriesensor welchen diesen über den Motorraumkabelbaum mit dem BCM verbindet. Diese Verbindung hat nur eine Ader (LIN-Signal) da die Spannungsversorgung direkt von der Batterie bezogen wird.
Hier im Bild ist der Stecker im Kabelbaum zu sehen. Dieser befindet sich im Motorraum, oberhalb der Batterie am Domlager des fahrerseitigen Stoßdämpfers:

Ist, wie auf dem Foto zu sehen, ein Stecker mit einem Blind-Einsatz vorhanden, ist der Retrofit mechanisch/elektrisch sehr einfach.
Der Umbau
- Batterie ausbauen
- Vorhandenes Masse-Kabel ausbauen
- Masse-Kabel mit Sensor einbauen und anstecken
- Fahrzeugkonfiguration anpassen
- Batteriesensor (Anlernwerte) zurücksetzen
Zu 2)
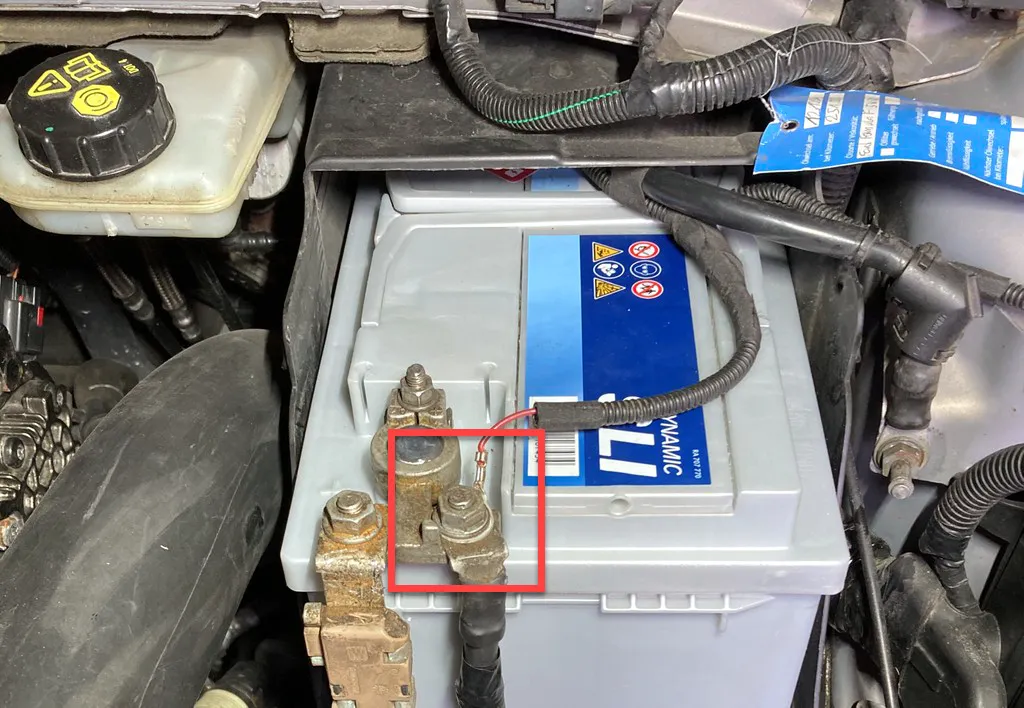
Mit einer 13er Nuss den Bolzen herausdrehen:
und Massekabel entnehmen:

Zu 3)
Neues Massekabel (mit Sensor) mit gleichem Bolzen an gleicher Position befestigen. Batterie wieder einsetzen, Minuspol anschließen und Batterie ins Fach schieben. Das Plus-Kabel vom Sensor nach vorn rausschauen lassen:
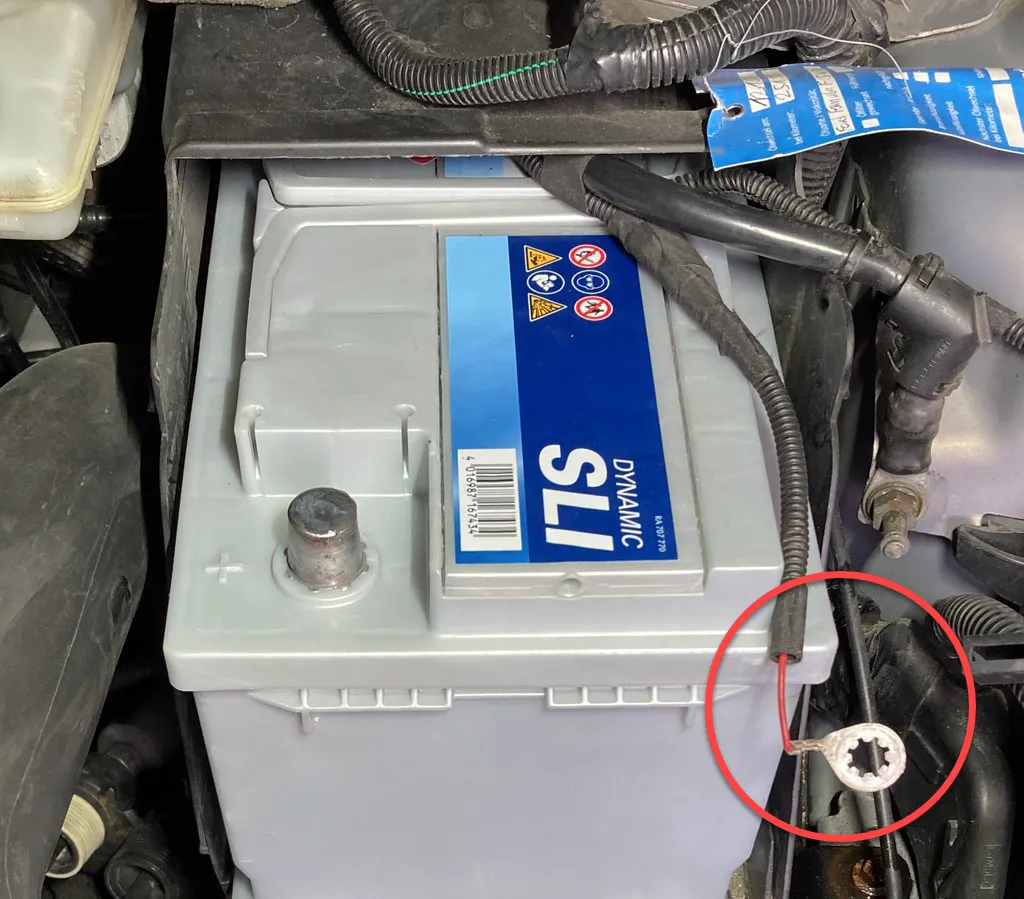
Diesen unter die Mutter am Plus-Pol einlegen:
Den braunen Blindstecker aus dem Sensor-Stecker entfernen. Hierzu auf der Rückseite des Steckergehäuses den Arritierthebel reindrücken und den Blindstecker herausziehen. Zur besseren Veranschaulichung habe ich den Stecker von seinem Halter abgezogen und von der Unterseite (gedreht) gezeigt. Wenn man weiß wo man drücken und ziehen muss ist es ganz einfach:

Zuletzt den Stecker vom Sensor genau dort einstecken:
Zu 4)
In ForScan über die BCMii Fahrzeugkonfiguration die Einstellung von "Battery Monitor Sensor" anpassen:
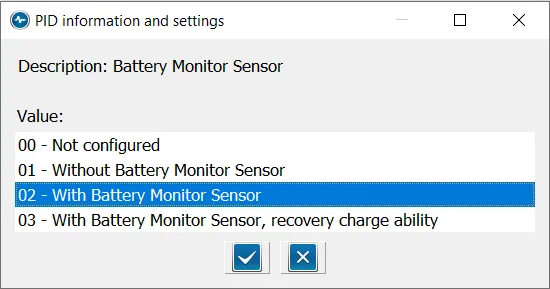
Alternativ in ELMConfig:
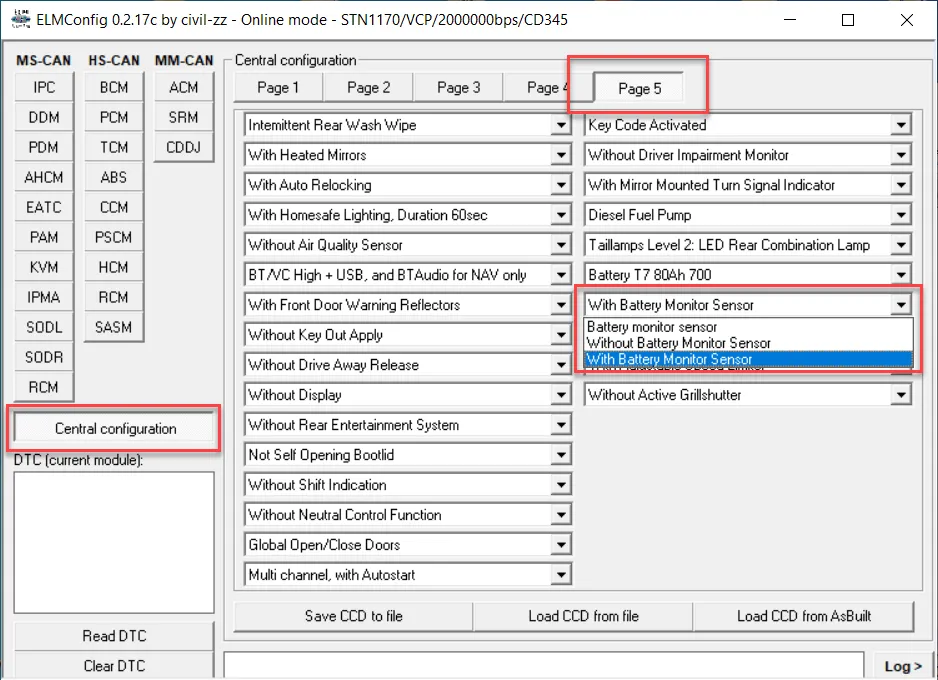
Anschließend die geänderte CCC ins BCM und IPC schreiben.
-
Frag doch einfach was Du machen willst und wir geben Dir hier gern Hilfe zur Selbsthilfe. Wenn Du die im Wiki genannten Sicherheitshinweise gelesen hast und gewissenhaft einhälst kann nicht viel schief gehen. Wichtig ist, das die CCC kein Spielzeug ist, alles was dort eingestellt wird hat irgendeine Funktion und setzt die passende Hardware voraus.
-
Poste mal Deine CCC und den DTC. Und kontrolliere den Kodierstecker nochmal. Es sind ja genau die Mikrofon-Leitungen die umkodiert werden...
ZitatHierbei wird das Mikrofon zuerst zum MCA/NX geführt („MICRO+“ und GND) und von dort gelangt das Signal dann vom Ausgang „MONO2“ zum Sound&Connect-Modul. Im Vergleich zum AB-Loop wird das Radio also eingeschleift. Dies verdeutlicht auch die dafür notwendige Einstellung in der CCC („….+Nav“).
-
Du meinst sicher einen "BA" Kodierten? 8- oder 20-polig?
https://mk4-wiki.denkdose.de/artikel/audio_…o-codierstecker
Rumliegen in diesem Sinne habe ich sowas nicht aber ich könnte Dir einen machen, habe alles dafür da... bzw. die Leitung für die fehlenden Pins und Du baust ihn Dir selbst zusammen (umpinnen)?
-
Leute, jetzt ufert es aber aus...
-
Naja, wenn die Pumpe zwei Anschlüsse hat ist es doch recht wahrscheinlich das sie auch durch umpolen in verschiedene selbige pumpt. Ich würde eher mal die BcM Pins rausnehmen und umgelehrt polarisiert an 12V geben...
-
So langam frage ich mich ob Ford das würfelt?
-
Hm, könnte es vielleicht sein das Du beim auspinnen, reinigen von Pins evtl. was falsch wieder eingepinnt hast?
-
Ok, ich denke da ist nun hinreichend geklärt das es genügend mit und ohne Start-Stopp gibt. Die mit Start-Stopp werden eine EFB-Batterie und einen Batteriesensor haben, die anderen nicht.
Wichtiger wäre mir jetzt der CAN Sniff

Mein Batteriesensor ist heute gekommen, den werde ich mit dem Batteriewechsel einbauen und dann mal schauen was sich dadurch ändert. Gut möglich das sich garnichts ändert, wenn das nur für Start/Stopp genutzt wird, wäre mir auch wurscht, zur Not zapfe ich den Sensor per LIN selbst an. Wenn aber wenigstens die Parameter auf dem CAN landen, umso besser...
-
Ich habe den Verdacht das die BMS Werte auf der HS-CAN ID 380 liegen könnten. Ich habe (noch) keinen Sensor verbaut und die Payload der Message sind nur 0en. Vielleicht hat hier jemand mit CAN Sniffer Tool und Sensor die Möglichkeit das mal gegen zu prüfen?
Sniffen könnte man mit ElmConfig
https://mk4-wiki.denkdose.de/artikel/elmconfig/sniffer_mode
oder mit einem Terminal (Putty) und den entsprechenden AT Befehlen.
-

FL, Euro 5, Diesel, EZ 04/2013 (im FZG-Schein Nr. 6=07/12/2012, sofern relevant), ohne Start/Stop. Sensor muss ich auch mal nachschauen.
Aha, den dürfte es dann doch laut Gesetz eigentlich gar nicht geben?
-
Nein. Mein Trend 2,0 Duratec FL hatte keinen. Der war von 09/2010 und EURO5 ohne S/S!
Das könnte schon mit S/S zusammenhängen.
Meiner (auch FL, auch 9/2010) hat Euro 4 und auch kein Start/Stopp und auch keinen Sensor. Die Aussage war ja auch das erst Neuzulassungen ab 1.1.2011 verpflichtend nur noch für Euro5 gab und dann musste Start/Stopp und Batteriesensor enthalten sein.
-
Danke, das ist auch mein Wissensstand und bedeutet das praktisch alle "echten" FL, also ab Baudatum 1.1.2011 diesen Sensor enthalten, egal ob Diesel oder Benziner?
-
Mit ForScan sollte man vom BCM folgende Parameter auslesen können:
- BATTERY_AGE
- BAT_CURRENT
- BAT_ST_CHRG
- BET Batterieelektrolyttemperatur
- C_VOLT
- MAIN_ECUV
-
Was die ganzen Einstellwerte angeht, das schaue ich mir in der Tat nochmal in Ruhe an. In der CCC kann man da wohl so einiges hinterlegen, aber nicht alles wird Sinn ergeben, bzw. von unserem BMS verwendet... Und dann gibt es da noch die Parameter die nicht aufgeführt sind, z.B. die Zielkapazität, die laut vorliegenden Informationen nur 80% beträgt. Einige Parameter werden auch wohl nur in Kombination mit einem Batteriesensor einen Nutzen haben, außer die Software "errechnet" sich fehlende Messwerte. Es nutzt alles nichts, ich brauche da Klarheit, daher habe ich mir jetzt mal einen Original Batteriesensor bestellt und werden den mal nachrüsten. Ob das überhaupt geht steht noch auf einem ganz anderen Blatt, da brauche ich wohl auch mal Eure Mithilfe um die Werte zu vergleichen.
Gab es den Batteriesensor im Mondeo schon immer, ab dem ersten vFL? Oder gab es ihn erst später und nur in Verbindung mit dem Start/Stopp System? Funktioniert er womöglich nur in Kombination damit?
Die Laderegelung (LIN zur Lichtmaschine) war jedenfalls schon immer da, d.h. das PCM (an dem die Lichtmaschine per LIN verbunden ist) steuerte Ladespannung und Strom bzw. gab dies als Messwerte zurück. Ob das PCM das nun einfach nur über HS-CAN ans BCM transportiert und dort die BMS-Regelung stattfinde oder ob das BMS "Smart-Charge" Teil der PCM-Software ist, wäre auch noch zu klären. Der Sensor jedenfalls ist am BCM angeschlossen, was ich auch irgendwie wieder interessant finde, denn den hätte man ja auch am PCM anklemmen können? Warum dieser Split? Das kann doch eigentlich nur bedeuten das das BMS eher Teil der BCM-Firmware ist?
Meine erste Aufgabe ist herauszufinden was das BCM mit den Parametern des Batteriesensors macht bzw. ob es diese nur intern verrechnet oder auch netterweise auf einen CAN-Bus (HS oder MS-CAN) legt, bzw. ob man diese mit UDS-Funktionen auslesen kann? Ein BMS reagiert nie sprunghaft, es ist immer ein Integral über längere Zeit, d.H. die Regelwerte ändern sich langsam. Das zurücksetzen des Batteriesensors ist also nichts anderes als das löschen der Anlernwerte die vom BMS (vermutlich im BCM) gespeichert wurden.
Ich kann mir also mal die CAN-Botschaften anschauen mit denen man den Batteriesensor zurücksetzt. Die davon angestoßenen UDS-Funktionen könnten mich in der BCM Firmware an den Punkt führen wo die Meßwerte abgelegt sind und evtl. auch in die Nähe der CAN-Sendefunktionen. Ich könnte mich parallel an den LIN-Bus des Sensors klemmen und seine übermittelten Messwerte mitlesen und schauen ob ich diese Werte in CAN-Botschaften wiederfinde. Wie immer findet man im Netz keine direkte Antwort auf die Fragen zu CAN-Botschaften im MK4. Die KI verweist auf mein Wiki als mögliche Informationsquelle, putzig
-

Ich zweifle an dem Meßverfahren. Ohne Strommessung fehlt m.E. ein wesentlicher Faktor. Vielversprechender sind da Projekte aus dem Wohnmobil und Solarbereich die einfach einen gängigen KFZ Batteriesensor verwenden. In dem anderen Thread
ThemaReverse Engineering des Batterie-Sensors
Aus Interesse wollte ich mir mal das BMS "Batterie-Management-System" des Mondeo vornehmen. Das ist immer vorhanden, seit dem ersten MK4 und wird so vermutlich auch in vielen, wenn nicht gar allen anderen Ford-Modellen auch zum Einsatz kommen. Die Dimensionierung ist freilich etwas unterschiedlich, so wie es die Modelle und Fahrbedingungen sind.Das Batterie-Management-System
Wo genau sich die BMS-Software befindet konnte ich noch nicht abschließend ermitteln. Ich vermute das sie Teil der… Go4IT
Go4IT27. Januar 2026 um 08:44 beschäftige ich mich mal näher mit dem Thema. Hier sollte es ja nur um die Batterie, das Starterkabel und Starthilfe-Packs gehen.
-
Aus Interesse wollte ich mir mal das BMS "Batterie-Management-System" des Mondeo vornehmen. Das ist immer vorhanden, seit dem ersten MK4 und wird so vermutlich auch in vielen, wenn nicht gar allen anderen Ford-Modellen auch zum Einsatz kommen. Die Dimensionierung ist freilich etwas unterschiedlich, so wie es die Modelle und Fahrbedingungen sind.
Das Batterie-Management-System
Wo genau sich die BMS-Software befindet konnte ich noch nicht abschließend ermitteln. Ich vermute das sie Teil der Motorsteuersoftware im PCM ist.
Am Motorsteuergerät (PCM) selbst ist per LIN-Bus die Lichtmaschine (Generator) angeschlossen. Der Generator läuft also nicht einfach permanent mit, so wie das früher der Fall war, sondern wird gezielt durch die BMS angesteuert und liefert eine programmierte Spannung welche die Batterie lädt. Der resultierende Ladestrom wird gemessen und dient dem BMS ebenfalls zur Regelung. Der Batteriesensor hingegen ist per LIN-Bus am BCM angeschlossen. Ich vermute das sich PCM und BCM über den HS-CAN Bus die Sensordaten austauschen, evtl. sind diese aber auch auf dem MS-CAN zu finden.
Der BMS Sensor
Bei Fahrzeugen mit Start/Stopp-System kam dann auch ein Batteriesensor hinzu (möglicherweise ist er auch bei Fahrzeugen ohne Start/Stopp verbaut...)

Dieser hat die Aufgabe den Ladezustand (SOC = State-Of-Charge) der Batterie noch besser bestimmen zu können. Der Sensor misst die Batteriespannung, Temperatur (naja, nicht wirklich die der Batterie sondern eher der Umgebung der Batterie) und den Stromfluß in/aus der Batterie. Er wird am Minuspol eingeschliffen, liegt also elektrisch gesehen in Reihe mit der Batterie:
Der Sensor selbst ist natürlich nicht von Ford entwickelt, sondern vermutlich von Hella. Im Mondeo hat der Sensor die Typenbezeichnung AG9N-10C679-*, bei Hella trägt er die Bezeichnung 6PK 013 824-001. Der Sensor ist immer derselbe, unterschiedlich sind die Befestigung, das ggf. bereits angequetschte Massekabel und natürlich die Sensor-ID (LIN PID). Hella liefert die Sensoren programmiert mit der PID der Fahrzeughersteller-BMS aus.
Hella gibt an folgende Parameter über den Sensor ermitteln und liefern zu können:
- Aktueller Ladungszustand der Batterie (SOC = State-Of-Charge)
- Alterung der Batterie (SOH = State-Of-Health)
- Voraussichtliche Startfähigkeit (SOF = State-Of-Function)
- Batteriespannung (V)
- Lade- bzw. Entladestrom (A)
- Temperatur (°C)
Die Messung erfolgt über einen sog. "Shunt", das ist ein sehr niederohmiger Widerstand (Hella gibt 68 µOhm and, also 0,000068 Ohm) mit hoher Präzision und möglichst geringem Temperaturkoeffizienten. Die über ihm abfallende Spannung ist ein Maß für den Stromfluß. Das ist, neben Hall-Sensoren eine bewährte und zuverlässige Messmethode in der Elektronik.
Das Sensor-Protokoll
Laut mir vorliegenden Informationen nutzt Hella das LIN Protokoll 2.0 mit einer Bitrate von 19.200 Baud. Da der Sensor weit verbreitet ist und auch in separaten Steuerungen zur Anwendung kommt, ist sein Protokoll gut dokumentiert. Ich könnte mir also auch eine Nachrüstung vorstellen, selbst wenn meine PCM/BCM Software den Sensor nicht unterstützt, dann würde ich mir die Daten selbst ziehen und verarbeiten.
Der Sensor wird vom BMS mit den Batterieparametern programmiert und liefert dann seinerseits die Messwerte. Bevor ich mich damit befasse versuche ich mal herauszufinden ob und wo man diese Messwerte auf dem CAN-Bus findet. So ließen sie sich viel einfacher auswerten. Es ist aber gut diese LIN-Grundlagen zu kennen, dann lassen sich die Daten die man ggf. findet besser interpretieren.
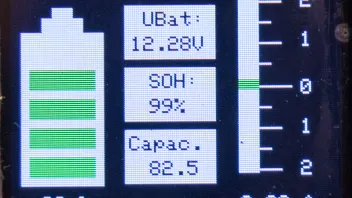
Darstellung der Sensorwerte
Eine Darstellung der ganzen Parameter im Convers+ (oder auch in den "kleinen" Tachos) wäre natürlich ein Traum, ist aber für mich nicht realisierbar. Es bliebe also sich dafür ein eigenes kleines "Dashboard" zu bauen oder das über sein Handy zu regeln...
-
Danke für die Info Ossi Das Problem hier ist die Messgenauigkeit und Verfahren. Das Convers zeigt die Spannung an die irgendwo an einem Modul intern gemessen wird. Es wäre mal mit einem geeignet genauem Multimeter gegen zu prüfen wie präzise die Nachkommastelle ist. Ein Meßfehler von 10-15% würde mich nicht wundern. Zudem sagt die Ladespannung (Motor an und Generator lädt, was er ja nicht immer tut, dank BMS) bzw. Batteriespannung nur bedingt etwas über die Kapazität aus (egal ob gesunde oder defekte Batterie). Ich hatte es oben ja ausgeführt.
Wenn Du Start/Stopp hast, hast Du auch einen Batteriesensor. Den habe ich leider nicht und daher bin ich mir nicht sicher wie mein BMS arbeitet, denn es hat ja faktisch keine Rückmeldewerte.