Der neue Motor passt vermutlich nicht perfekt zum Türmodul? Und das schiefe könnte auch vom Hebermechanismus mkommen. Ich würde einen Original kaufen und verbauen...
Beiträge von Go4IT
-
-

Wurde dieses Problem je gelöst und wenn ja, wie?
-
Er meint sicher den Ölkühler, der ist vorn (habe ja den gleichen Motor).
-

Ist da mit "Antiheft Perimeter" Innenraumüberwachung auch aktiv?
Der Innenraumsensor ist ein eigener Parameter. Wie das zusammenspielt habe ich weiter oben ja mal dargestellt. Wenn Du CAT1 nutzen willst brauchst Du eine Akku-Hupe mit Levelsensor.
-
Die Stufe "Cat1 Thatcham" ist nur wenn Du ne Akkuhupe verbaut hast, sonst nur "Antitheft Perimeter".
-
Nö, da braucht es nix außer der Zuordnungslogik mittels Reifendruckdifferenz (steht im Wiki) da man ja keine Lokalisationsantennen hat. Das mit dem abstürzen hatte ich auch mal gesehen, aber klappt bei mir soweit störungsfrei. Reset-Zuordnung, dann prüfen bis Druck stimmt, dann Zuordnen, fertig.
Oder, wenn man die RDSK-Sensor-IDs kennt, kann man das auch über das TPMS-Tool machen, aber das ist fast aufwändiger als über den Druckunterschied.
-
Du meinst wohl eher Alibaba und die vierzig Raubkopierer
 Das mit den sieben war was anderes. Aber ja, wer mehr für Sensoren ausgibt als 50-60€ für einen Satz ist selbst schuld, selbst in DE.
Das mit den sieben war was anderes. Aber ja, wer mehr für Sensoren ausgibt als 50-60€ für einen Satz ist selbst schuld, selbst in DE. -
Ich überprüfe gerade auch ob ich von einem Alarm etwas auf dem CAN-Bus sehe. Mein erster Kandidat wäre der MS-CAN, da hier ja auch das IPC angeschlossen ist, welches ja davon etwas mitbekommen sollte.
Mit meinem CAN-Sniffer habe ich dazu zwei Aufnahmen gemacht, einmal beim abgeschlossenen Fahrzeug (mit deaktiviertem Innenraumsensor) die Tür übers geöffnete Fenster mit Schlüssel in der Tasche geöffnet (kein Alarm) und einmal ohne Schlüssel (mit Alarm). Die Logs habe ich dann mit meinem Analysetool CaLiGraph verglichen und meine auf ID 0x501 und 0x503 einen Indikator gefunden zu haben:
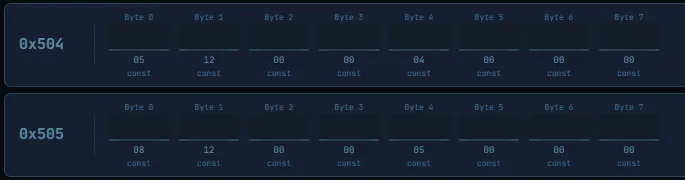
Ohne Alarm:
Mit Alarm:
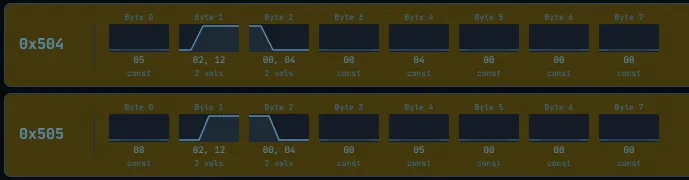
Offenbach ändert sich bei 0x504 und 0x505 nur Byte 1 und 2 und es gibt nur zwei Werte, 0x02 zu 0x12.
0x02 (0b0000 0010) => 0x12 (0b0001 0010) => Bit 4
0x00 (0b0000 0000) => 0x04 (0b0000 0100) => Bit 2Dabei ist es vom Ablauf her so, das im Ruhezustand nur die ID 0x0505 existiert und vermutlich im Alarmfall die 0x504 hinzu kommt.
Ich mache nochmal eine Messung ohne Türöffnung für 10 Sekunden und eine bei der ich den Alarm übers geöffnete Fenster durch den Innenraumsensor provoziere, ob das zum selben Ergebnis führt. Und dann natürlich auch nochmal auf dem HS-CAN.
-

auch wenn ich als (mittlerweile) MK5-Fahrer hier nur noch mitlese, kann ich zumindest mit einem "Beweis" für eine Meldung der Alarmanlage dienen:
Ich bekommen zum verrecken keine Meldung, egal was ich einstelle oder tue
 Wenn Du magst, sende mir doch mal Deine CCC per PN, wenn Du die noch hast?
Wenn Du magst, sende mir doch mal Deine CCC per PN, wenn Du die noch hast? -
Genau, RDKS gibt es beim Mondeo nur über die Radsensoren, nix anderes. Das ist auch dann ein echtes RDSK

Und ja, man kann das aktivieren, siehe Wiki => https://mk4-wiki.denkdose.de/artikel/rdks/start und Anleitung => https://mk4-wiki.denkdose.de/artikel/rdks/rdks_nachruesten
Aber Achtung: Du brauchst neben den Sensoren auch eine gepatchte Version des Convers+ denn für das "vollständige/originale" RDKS wird ein spezielles BCM und Antennen über den Rädern benötigt. Ich habe auch das "Schmalspur-RDKS" seit Jahren und bin hoch zufrieden. Auch mir hat es schon den Arsch gerettet.
-
Ich habe heute nochmal getestet, wenn man die Alarmanlage in der CCC aktiviert, den Innenraumsensor deaktiviert lässt, dann hat man die Alarmfunktion beim öffnen einer Tür ohne Schlüssel. Allerdings sieht man keine Anlageneinstellungen im Convers+, auch nicht beim ausschalten der Zündung, das gibt es erst wenn der Innenraumsensor aktiviert wurde, witzigerweise auch wenn dieser garnicht existiert. Darüber gibt es zwar dann einen DTC:
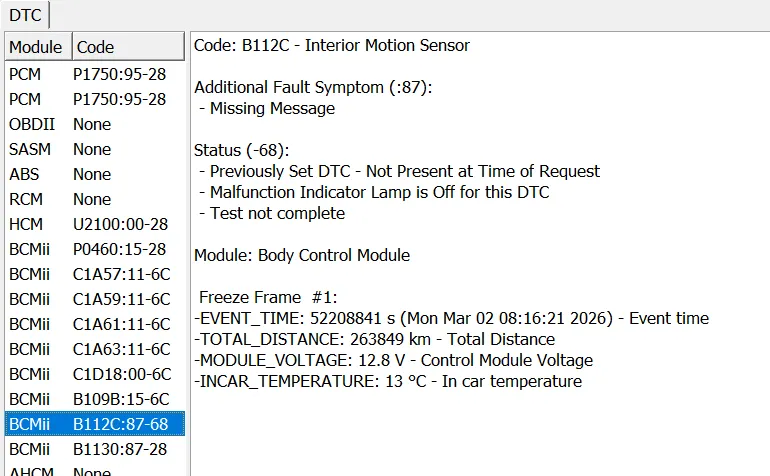
aber sonst keinerlei Störungsanzeige oder Fehlverhalten der Alarmanlage.
Interessant ist noch, das es in ForScan im ENG-Mode noch den Typ "Standard alarm" gibt, keine Ahnung wozu der dient:
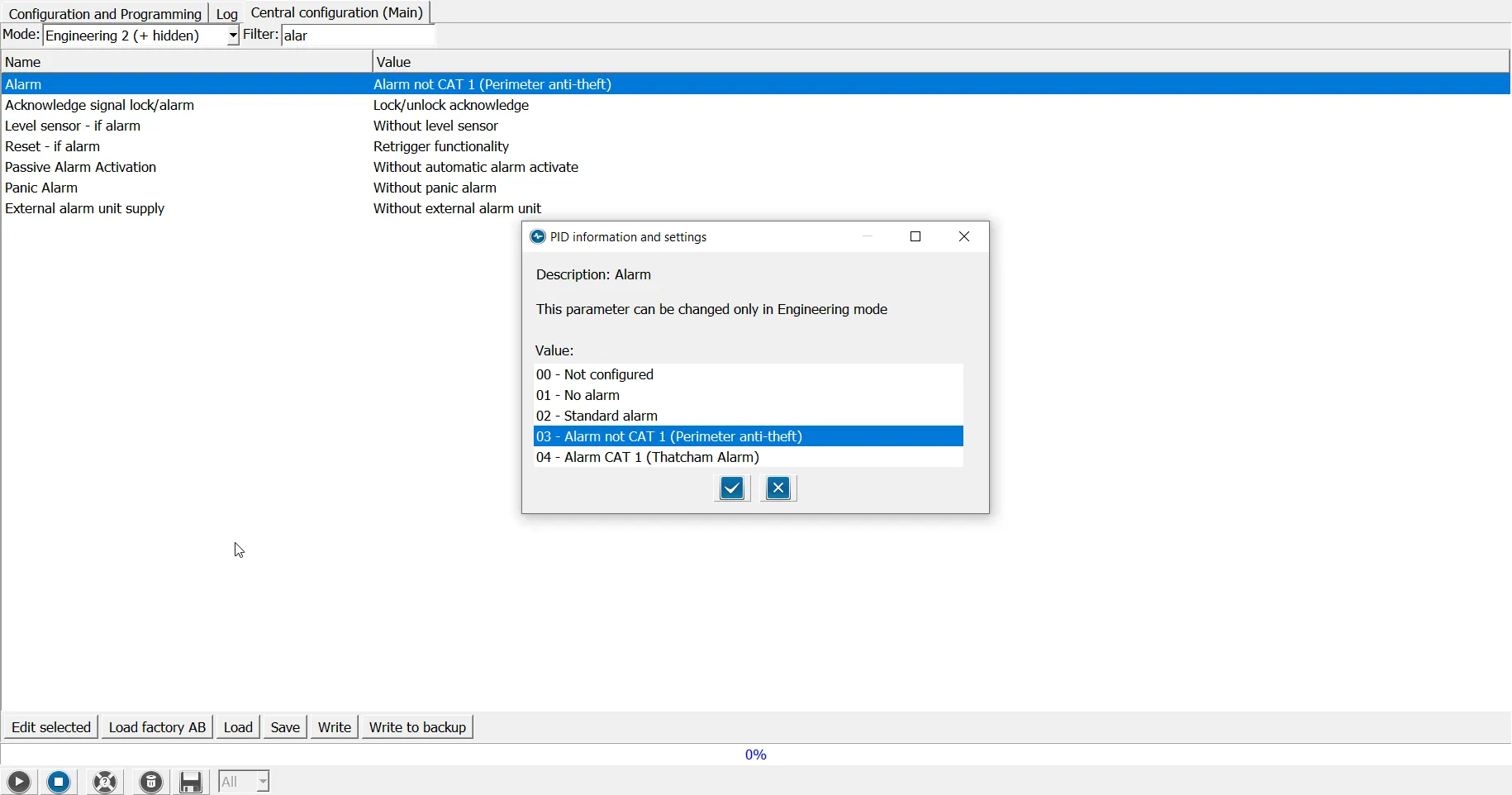
Auch über den "Passive Alarm" finde ich erstmal keine Infos:
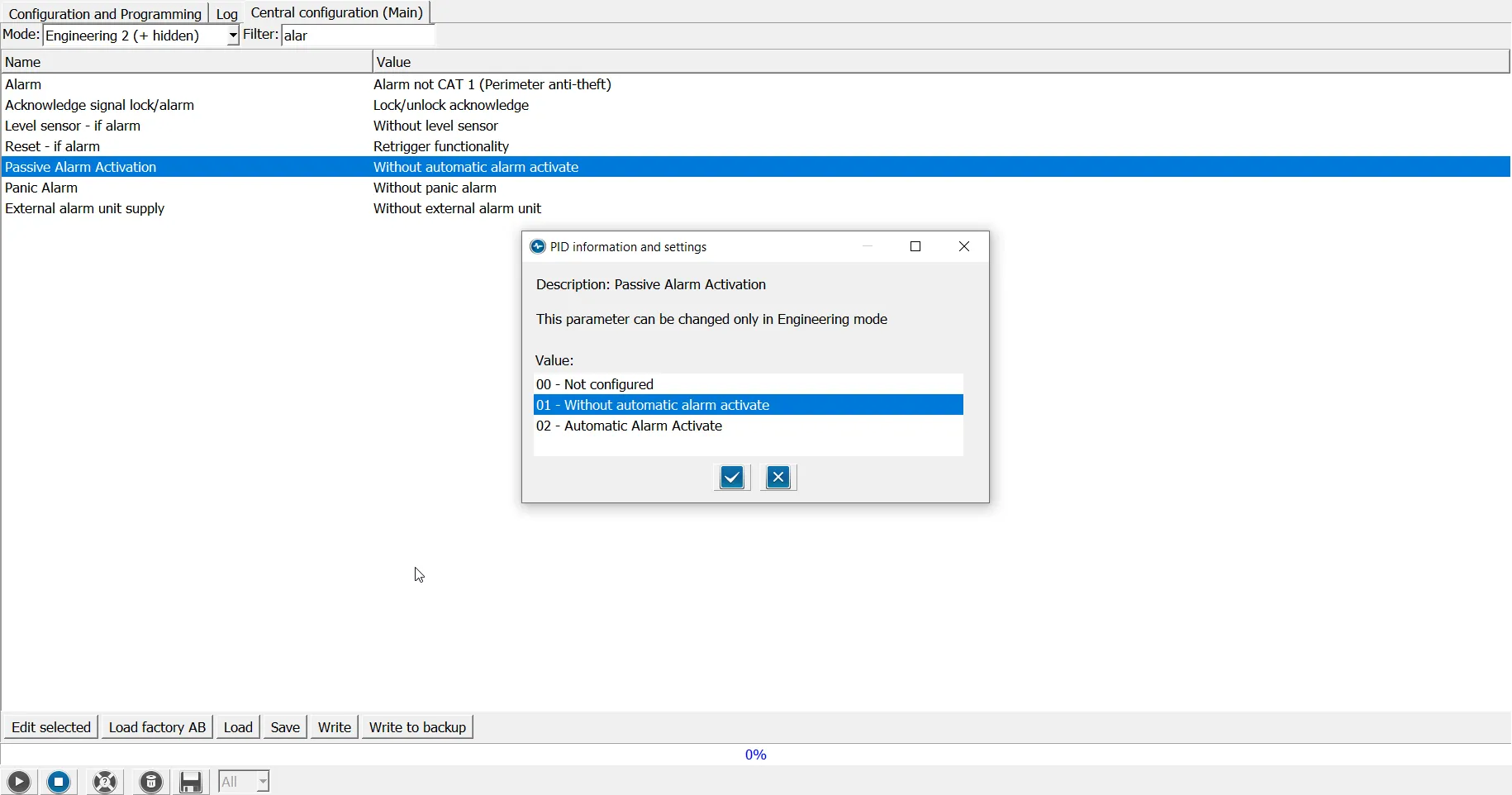
Auch interessant:
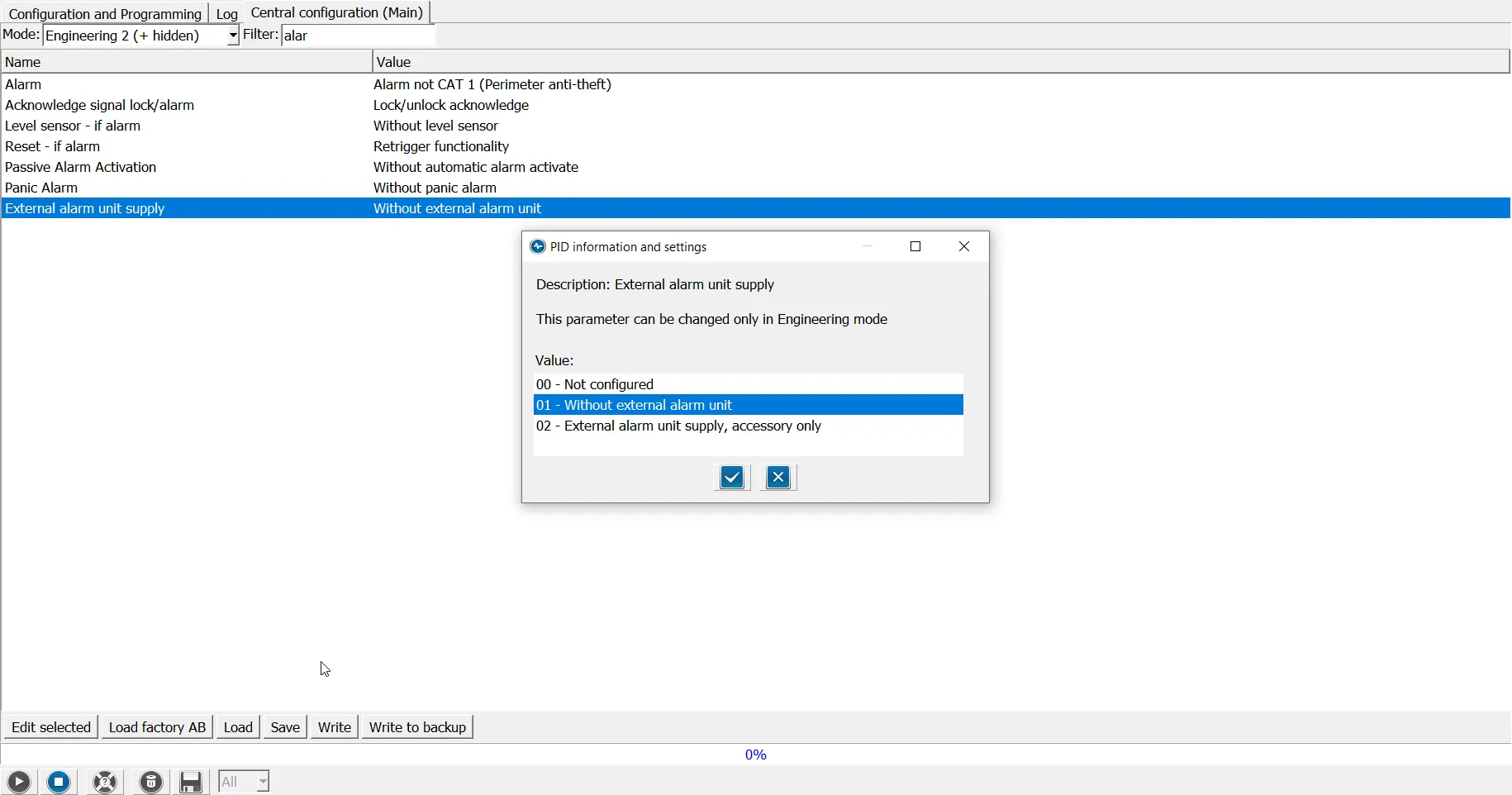
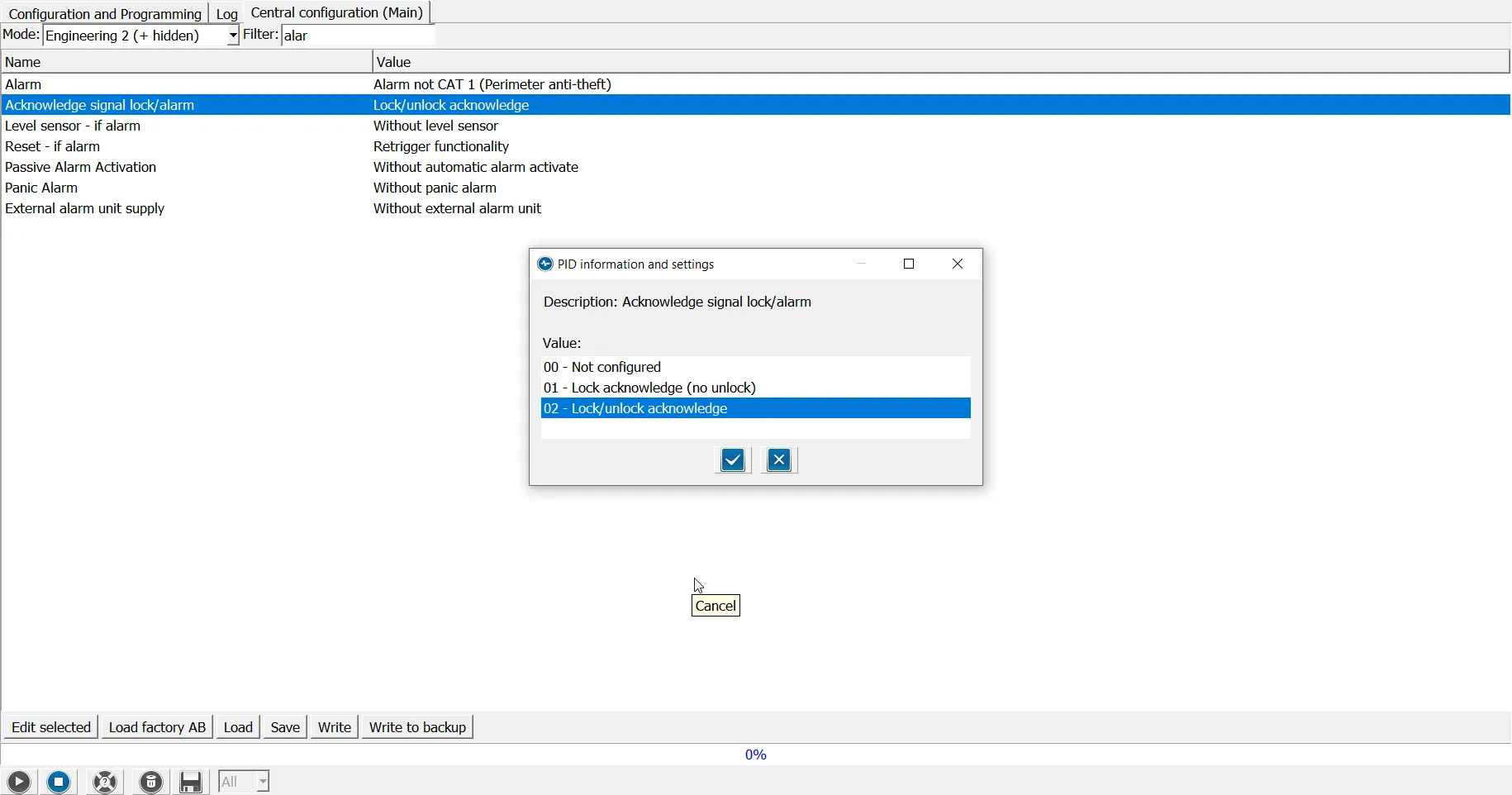
Hiermit lässt sich wohl einstellen wie man den Alarm quittieren kann, mit Auf/Zuschließen Knopf auf der FB oder nur mit Aufschließen:
-
Meinen LIN-Sniffer, gebaut mit günstiger Hardware basierend auf einem ESP32, findet ihr hier
-

Dient mir als Altersfahrzeug ,als Spielzeug habe ich noch ein Cabrio😎😊
"Altersfahrzeug"? Klingt wie Altersteilzeit
Oder meinstest Du eher "Alltagsfahrzeug"?Naja, so oder so, willkommen hier im Forum!
-
Ich habe mir für die weiteren Tests einen Zwischenstecker für den Lichtschalter gebaut, diesen stecke ich zwischen Kabelbaum und Lichtschalter und er hat einen Abzweig für den Anschluß meines LIN-Sniffer Tools.
Dann habe ich aufgezeichnet (log file im Anhang) und mit dem statischen Test oben verglichen, dabei konnte ich folgendes definieren:
LIN ID Bytes Source Interval Meaning 0x11 2 LSM Schalterpositionen und Taster
Nebelscheinwerfer-Taste gedrückt: Bit 5 von b[1]
Nebelschlußleichte-Taste gedrückt: Bit 6 von b[1]
Lichtschalter-Position:
b[0] Bits 6+5
x00x xxxx 0x = aus
x01x xxxx 2x = stand
x10x xxxx 4x = light
x11x xxxx 6x = autoHelligkeit für Ambientenbeleuchtung: b[0] Bits 0x00 (LOW) - 0x14 (HIGH) (theoretisch 0x1F)
xxx1 11110x22 4 BCM statisch "00 0B 00 00" 0x23 4 LSM Schalterbeleuchtung (Hintergrund)
06|09 xx xx xx - byte[0] value 0x06 or 0x09 => LED von Lichtmoduswähler leuchtet
xx xx 00-FF xx - byte[2] value 0x00-0xFF => Helligkeit der anderen 5 LEDs (0=Dunkel, 0xFF=volle Leuchtstärke)0x32 2 BCM 100 bis 500 ms statisch "00 00" LSM = Light-Switch-Module = Lichtschalter
BCM = Body-Control-Module = Zentralelektrikbox -
Kann ich gut nachvollziehen, bei mir ist es auch eher der letzte Mondeo und wird eher auch kein Ford mehr werden... mal sehen.
Dann wünsche ich viel Spaß und evtl. findet man sich in anderen Foren mal wieder
P.S.: Brauchen wir so langsam ein Forum "Mitglieder Verabschiedung", eh?
-

Bei mir ist das Schloss vorhanden, wird aber nicht angezeigt das MH offen ist
Muss das extra in CCC aktiviert werden?
Ein Schloss hat jeder, nur der Kontakt im Schloss ist nicht da. Zieh mal den grünen Stecker vom Schloss ab und versuche mit dem kleinen Finger die Pins in der Buchse des Schlosses zu ertasten, da werden keine sein.
Und ja, die Meldung kommt nur dann wenn Du in der CCC die Alarmanlage Perimeter aktiviert hast.
-
Ich habe es gerade nochmal ausprobiert, ich bekomme keinerlei Meldung im Convers+ (FL). Egal ob ich den Alarm durchlaufen lasse, also nach 3 Minuten verstummt der ja automatisch oder ob ich währenddessen das Fahrzeug öffne. Das ist seltsam!
Noch eine Erkenntnis: Der Innenraumsensor reagiert auch wenn man den Schlüssel dabei hat (Keyless), d.h. nur die Türöffnung von innen (durchs geöffnete Fenster) mit Schlüssel in der Tasche löst keinen Alarm aus, der Innenraumsensor hingegen immer. D.H. im Sommer besser nicht das Fenster offen/geöffnet lassen mit aktivem Innenraumschutz... Ob allerdings eine Fliege oder Motte reicht...? Ich muss mal ein paar Dinge testen, gut möglich das der modernere Focus-Sensor hier optimiert wurde?
Und noch eine Erkenntnis: Jeder Mondeo hat von hause aus die Möglichkeit eine minimale Alarmanlage mit wenig Zusatzhardware über die CCC-Funktion "Perimeter Antitheft" freizuschalten. Es braucht minimal die Zusatzhupe für den Kofferraum und wer mag kann auch das Haubenschloß wechseln, was zudem noch den Vorteil hat das man sieht wenn die MH nicht richtig zu ist, oder schließt dieses kurz. Dann reagiert die Alarmanlage auf Türöffnung durch unbefugte.
Für die Nachrüstung des Innenraumsensors muss man beim FL auf jeden Fall ein 3-poliges Kabel nachrüsten, das ist scheinbar nie vorhanden, beim vFL schon. Ist aber auch kein großes Drama, dazu mache ich im Wiki eine Anleitung.
Aufwändiger wird es ggf. mit der Akku-Hupe, mal sehen ob ich das auch noch angehe.
Was mich aber viel mehr reizen würde ist eine Alarmmeldung aufs Handy. Da krame ich mal in meiner Bastelkiste, da habe ich noch irgendwo GSM-Sender (GPRS gibt es ja auf Sicht nicht mehr in DE). Müsste dann das Alarmsignal auf dem CAN noch finden und auswerten, oder mich ggf. an den LIN hängen.
-
Und genau das verstehe ich nicht, da spart man an 0,2 Cent für einen Haubenschlosskontakt, wirft aber Relais für drei Euro ins Heck? Entweder sind die in der Entwicklungabteilung alle besoffen oder die Fertigung kann nicht lesen...
-
Ich meine ja nur das der Modulcode "AV11" auf einen B-Max deutet und keinen Mondeo. Gut möglich das der die gleiche Dachkonsole verwendet, so wie der Focus die gleiche wie der Mondeo hat.
-
Aaaarg, Kommando zurück! Das Focus-Modul funktioniert einwandfrei, ich Depp hab einfach beim Einbau den Stecker nicht richtig ins Modul eingesteckt

Damit steht für mich fest: Die Module von Ford funktionieren alle, egal für welches Modell as gedacht war, sogar beim jüngeren offensichtlich.
Interessant ist das die Elektronik im Focus-Modul ("AV6N") deutlich aufwändiger erscheint als das vom Mondeo welches intern baugleiche seit MK3 ist.