Ich überprüfe gerade auch ob ich von einem Alarm etwas auf dem CAN-Bus sehe. Mein erster Kandidat wäre der MS-CAN, da hier ja auch das IPC angeschlossen ist, welches ja davon etwas mitbekommen sollte.
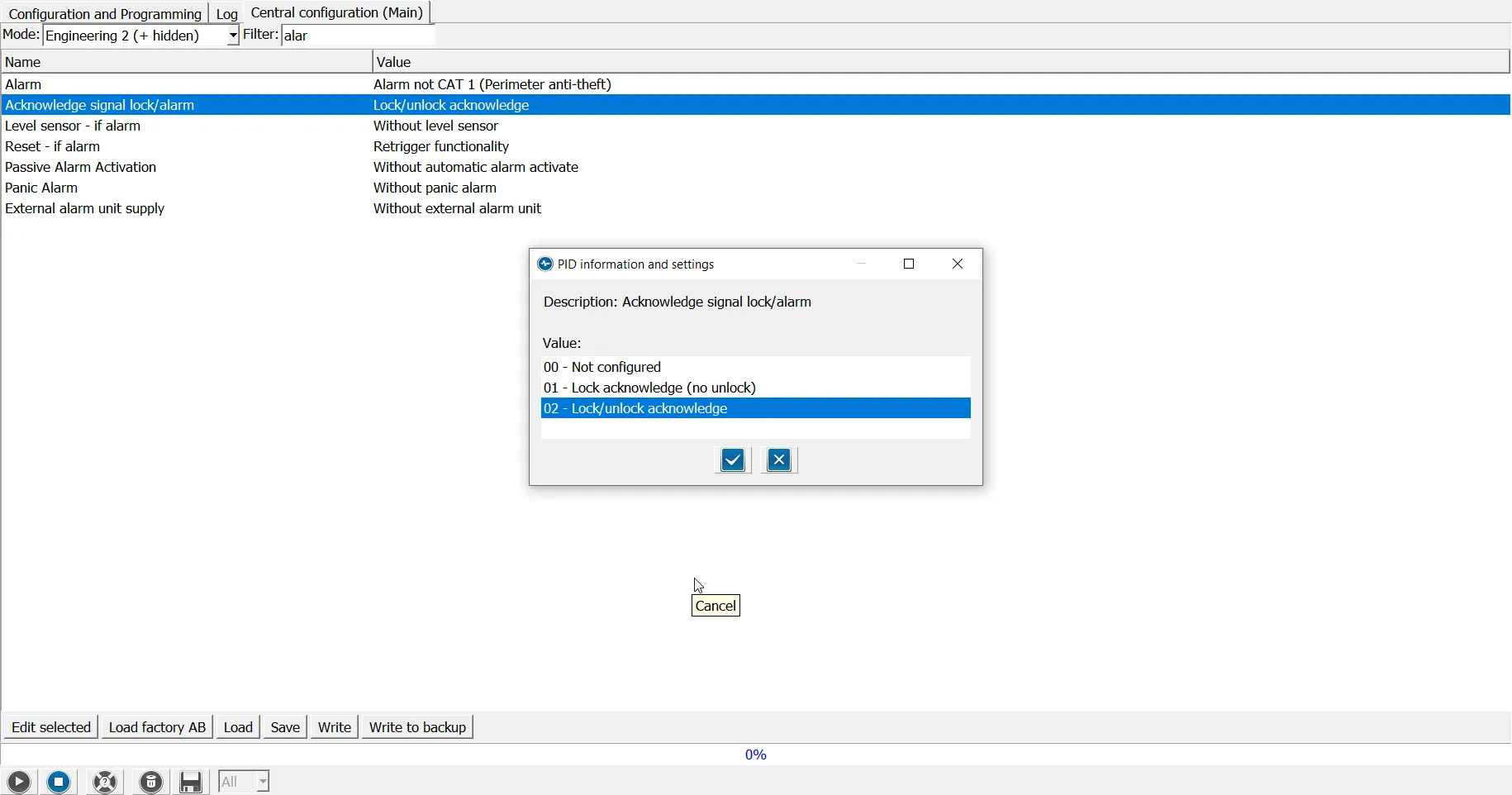
Mit meinem CAN-Sniffer habe ich dazu zwei Aufnahmen gemacht, einmal beim abgeschlossenen Fahrzeug (mit deaktiviertem Innenraumsensor) die Tür übers geöffnete Fenster mit Schlüssel in der Tasche geöffnet (kein Alarm) und einmal ohne Schlüssel (mit Alarm). Die Logs habe ich dann mit meinem Analysetool CaLiGraph verglichen und meine auf ID 0x501 und 0x503 einen Indikator gefunden zu haben:
Ohne Alarm:
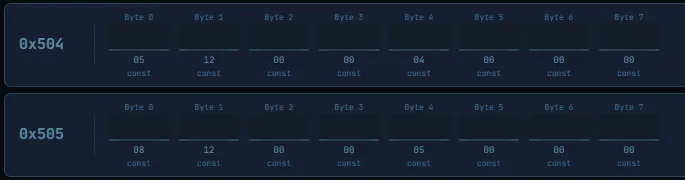
Mit Alarm:
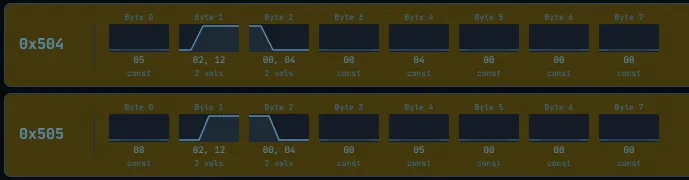
Offenbach ändert sich bei 0x504 und 0x505 nur Byte 1 und 2 und es gibt nur zwei Werte, 0x02 zu 0x12.
0x02 (0b0000 0010) => 0x12 (0b0001 0010) => Bit 4
0x00 (0b0000 0000) => 0x04 (0b0000 0100) => Bit 2
Dabei ist es vom Ablauf her so, das im Ruhezustand nur die ID 0x0505 existiert und vermutlich im Alarmfall die 0x504 hinzu kommt.
Ich mache nochmal eine Messung ohne Türöffnung für 10 Sekunden und eine bei der ich den Alarm übers geöffnete Fenster durch den Innenraumsensor provoziere, ob das zum selben Ergebnis führt. Und dann natürlich auch nochmal auf dem HS-CAN.